Wikipedia
---
## L'algorithme
### Initialisation du volume
- Définition des bornes de notre grille de voxels:
- $x \in \llbracket x_{\min}, x_{\max} \rrbracket$
- $y \in \llbracket y_{\min}, y_{\max} \rrbracket$
- $z \in \llbracket z_{\min}, z_{\max} \rrbracket$
- Définition d'une résolution de voxel:
- Pas trop grand, sinon un voxel projeté sur nos caméras comprends plusieurs pixels
- Pas trop petit, sinon plusieurs voxels se projetent sur le même pixel
- Exemple: $5.10^{-2}\ m$
- Initialisation des valeurs des voxels:
- Uniforme: $\forall \textbf{Q} = (X, Y, Z) \in \mathbb{R}, u_0(\textbf{Q}) = 1$
- Shape From Silhouette BE4 CHEH
---
## L'algorithme
### Principe du Shape from Silhouette
Implementation of a Shadow Carving System for Shape Capture, doi: 10.1109/TDPVT.2002.1024034
---
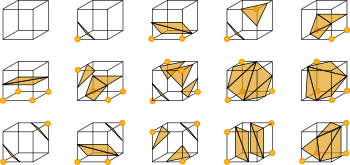
### Shape from Silhouette 3D
---
## L'algorithme
### Lancer de rayon (Fast Voxel Intersect)
---
## Résultats
### L'initialisation (Shape from Silhouette)
---
## Résultats
### Bordures
---
## Résultats
### Visibilité des voxels
---
## Résultats
### Évolution du level set
---
## Conclusion
### Ce que nous avons fait
- Réalisation du SfS en 2D/3D
- Réalisation du MVS par level sets en 2D avec initialisation par SfS
### Axes d'amélioration soon™
- Résultat en 3D
- $\{0, 1\} \to [0, 1]$

 $\mathcal{V} = \{ \textbf{Q} = (X, Y) \in \mathbb{R}^2, u(\textbf{Q}) > s \}, \quad s\in [0,1], \quad u \colon \mathbb{R}^2 \to [0, 1]$
---
### Exemple Level sets 3D
$\mathcal{V} = \{ \textbf{Q} = (X, Y) \in \mathbb{R}^2, u(\textbf{Q}) > s \}, \quad s\in [0,1], \quad u \colon \mathbb{R}^2 \to [0, 1]$
---
### Exemple Level sets 3D
 Concurrent Stereo Reconstruction, Martin R. Oswald, 2007
---
## L'idée générale
### Évolution de $u$
Concurrent Stereo Reconstruction, Martin R. Oswald, 2007
---
## L'idée générale
### Évolution de $u$
 Variational principles, surface evolution, PDEs, level set methods, and the stereo problem - Olivier Faugeras, Renaud Keriven, 1998
---
## L'idée générale
### Évolution de $u$
Variational principles, surface evolution, PDEs, level set methods, and the stereo problem - Olivier Faugeras, Renaud Keriven, 1998
---
## L'idée générale
### Évolution de $u$
 Variational principles, surface evolution, PDEs, level set methods, and the stereo problem - Olivier Faugeras, Renaud Keriven, 1998
---
## Hypothèses
### Discrétisation de l'espace
Variational principles, surface evolution, PDEs, level set methods, and the stereo problem - Olivier Faugeras, Renaud Keriven, 1998
---
## Hypothèses
### Discrétisation de l'espace

 Implementation of a Shadow Carving System for Shape Capture, doi: 10.1109/TDPVT.2002.1024034
---
### Shape from Silhouette 3D
Implementation of a Shadow Carving System for Shape Capture, doi: 10.1109/TDPVT.2002.1024034
---
### Shape from Silhouette 3D





 ---
## Résultats
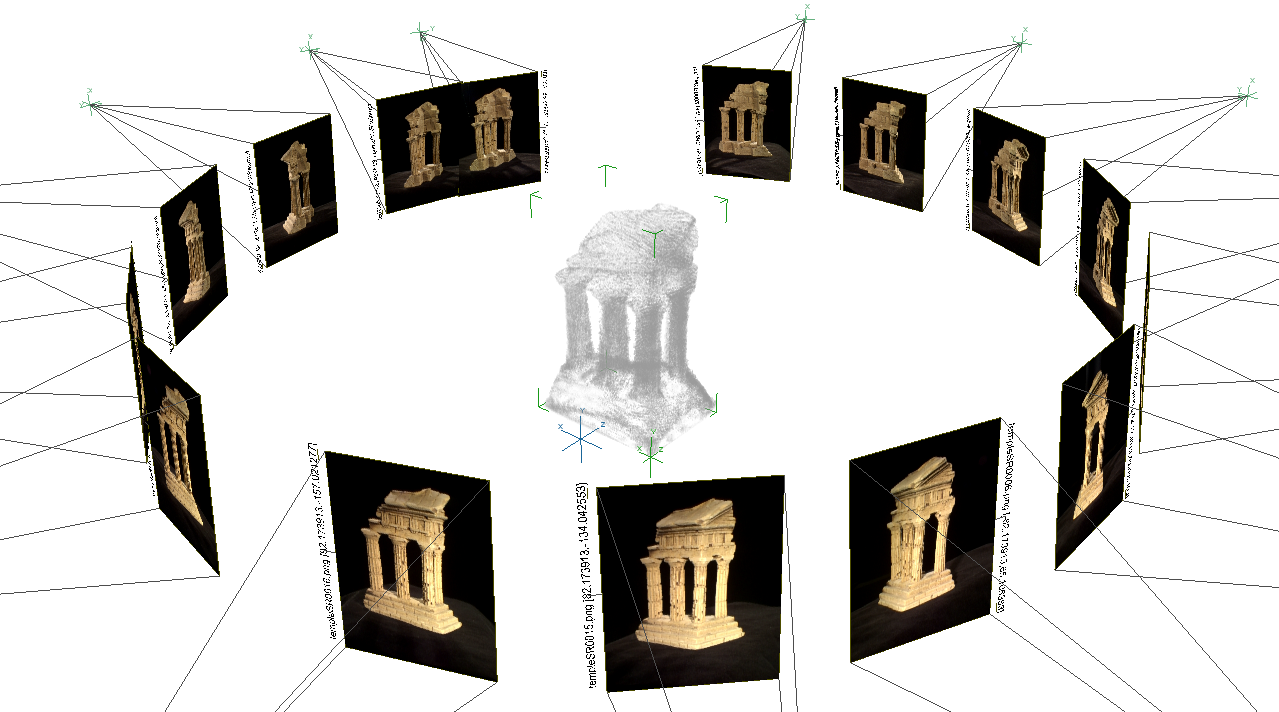
### Les données
---
## Résultats
### Les données







 ---
## Résultats
### Bordures
---
## Résultats
### Bordures
 ---
## Résultats
### Visibilité des voxels
---
## Résultats
### Visibilité des voxels



